안녕하십니까. 산업 현장의 안전과 효율은 곧 기업의 경쟁력이며, 이를 위해 실시간 위치 추적 시스템(RTLS)의 중요성은 나날이 증대되고 있습니다. 특히, 수 센티미터 수준의 초정밀 위치 정보를 제공하는 UWB(Ultra-Wideband) 기술은 그 혁신적인 잠재력으로 인해 많은 주목을 받고 있습니다. 하지만 UWB 측위 시스템을 도입하고자 할 때, 우리는 종종 두 가지 핵심 방식, 즉 TWR(Two-Way Ranging)과 TDoA(Time Difference of Arrival)라는 갈림길에 서게 됩니다.
이 두 방식은 UWB의 강력한 성능을 활용하지만, 그 작동 원리, 장단점, 그리고 최적의 적용 시나리오에서 명확한 차이를 보입니다. 세계 최고의 산업 안전 전문 에디터로서, 본 글에서는 TWR과 TDoA 방식의 심층적인 비교 분석을 통해 독자 여러분이 현장에 가장 적합한 UWB 측위 솔루션을 선택하는 데 필요한 전문적 통찰력을 제공하고자 합니다.
지금부터 UWB 측위 방식의 양대 산맥인 TWR과 TDoA의 모든 것을 면밀히 살펴보겠습니다.
UWB(Ultra-Wideband) 측위 기술의 핵심 가치
UWB는 기존 무선 통신 기술과 달리 매우 넓은 주파수 대역을 사용하여 짧은 펄스 신호를 송수신하는 초광대역 무선 기술입니다. 이는 다음 세 가지 핵심적인 이점을 제공하며, 산업 현장에서의 초정밀 측위 요구사항을 충족시킵니다.
- 초정밀 거리 측정: 좁은 펄스 폭 덕분에 다중 경로 간섭(Multipath Interference)에 강하고, 시간 분해능이 뛰어나 수 센티미터 수준의 정확한 거리 측정이 가능합니다.
- 뛰어난 실내 성능: 벽, 기계 설비 등 장애물이 많은 실내 환경에서도 안정적인 통신 및 측위 성능을 유지합니다.
- 높은 보안성: 낮은 전력 스펙트럼 밀도로 인해 외부 간섭에 강하고, 신호 탐지가 어려워 보안성이 뛰어납니다.
이러한 UWB의 특성은 위험 구역 내 작업자 위치 추적, 고가 장비 및 자산 관리, 물류 자동화 등 다양한 산업 안전 및 효율성 증대 분야에서 혁신적인 솔루션으로 자리매김하고 있습니다.
UWB 측위 방식의 양대 산맥: TWR vs. TDoA
1. TWR(Two-Way Ranging) 방식
TWR은 UWB 기술의 가장 기본적이고 직관적인 거리 측정 방식입니다. 이 방식은 ‘태그(Tag)’와 ‘앵커(Anchor)’ 간의 양방향 통신을 기반으로 거리를 측정합니다.
TWR 작동 원리
TWR은 다음과 같은 단계로 진행됩니다.
- 태그가 앵커에게 UWB 신호(Poll)를 보냅니다.
- 앵커는 신호를 수신한 후 일정 시간 지연(Reply Delay)을 거쳐 다시 태그에게 응답 신호(Response)를 보냅니다.
- 태그는 앵커로부터 응답 신호를 수신합니다.
- 태그는 자신이 신호를 보낸 시간부터 앵커로부터 응답 신호를 수신한 시간까지의 총 왕복 시간(Round Trip Time, RTT)을 측정합니다.
- 이 RTT에서 앵커의 Reply Delay를 제외하고 2로 나누면, 태그와 앵커 간의 단방향 통신 시간(Propagation Time)을 알 수 있으며, 여기에 빛의 속도를 곱하여 정밀한 거리를 계산합니다.
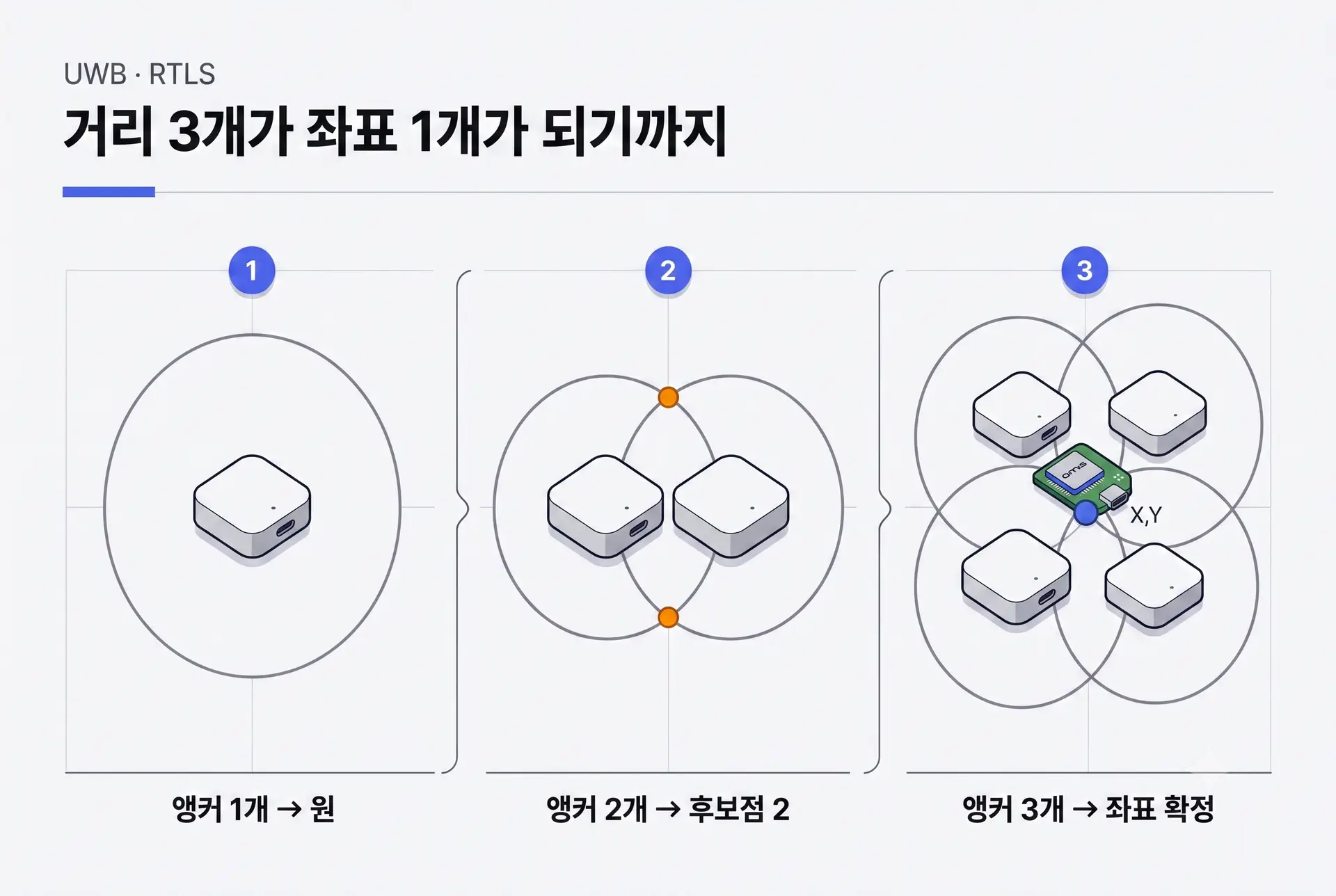
- 최소 3개 이상의 앵커로부터 측정된 거리를 기반으로 삼변측량(Trilateration) 방식을 통해 태그의 위치를 계산합니다.
TWR의 장점
- 간단한 시스템 구성: 상대적으로 간단한 논리와 적은 수의 앵커로도 시스템 구축이 가능합니다.
- 낮은 앵커 동기화 요구 사항: 각 앵커 간의 정밀한 시간 동기화가 필수적이지 않아 시스템 구축의 복잡성을 줄입니다.
- 유연한 확장성: 추가적인 앵커 배치 시 기존 시스템에 미치는 영향이 적고, 앵커 수에 따라 정확도 향상이 가능합니다.
- 강건성: 하나의 앵커에 문제가 발생하더라도 다른 앵커를 통해 위치 정보를 얻을 수 있어 시스템의 안정성이 높습니다.
TWR의 단점
- 태그의 높은 전력 소모: 태그가 각 앵커와 개별적으로 양방향 통신을 수행해야 하므로, 태그의 배터리 소모가 상대적으로 큽니다.
- 낮은 위치 업데이트 속도: 태그 수가 증가하거나 앵커 수가 많아질수록 각 태그가 모든 앵커와 순차적으로 통신하는 데 시간이 소요되어, 전체 시스템의 위치 업데이트 속도가 저하될 수 있습니다.
- 시스템 부하: 다수의 태그를 동시에 추적할 경우, 무선 채널의 혼잡도가 증가하여 성능 저하의 원인이 될 수 있습니다.
2. TDoA(Time Difference of Arrival) 방식
TDoA는 태그가 단일 신호를 송출하고, 여러 앵커가 이 신호를 수신하는 시간 차이를 분석하여 위치를 결정하는 방식입니다.
TDoA 작동 원리
TDoA는 다음과 같은 단계로 진행됩니다.
- 태그는 주기적으로 UWB 신호를 단방향으로 송출합니다.
- 주변의 여러 앵커(최소 3개 이상)가 이 태그 신호를 수신합니다.
- 각 앵커는 태그 신호를 수신한 정확한 시간을 기록합니다.
- 중앙 서버는 각 앵커가 기록한 수신 시간 정보를 취합하여, 기준 앵커 대비 다른 앵커들의 수신 시간 차이(Time Difference of Arrival)를 계산합니다.
- 이 시간 차이는 태그가 각 앵커까지 도달하는 거리의 차이를 의미하며, 이를 기반으로 쌍곡선 방정식을 생성합니다.
- 최소 3개 이상의 앵커 쌍에서 얻은 시간 차이로 형성된 쌍곡선들이 교차하는 지점이 바로 태그의 위치가 됩니다(쌍곡선 측량, Hyperbolic Trilateration).
- 이때 모든 앵커는 엄격하게 시간 동기화되어 있어야 합니다.
TDoA의 장점
- 태그의 낮은 전력 소모: 태그는 단방향으로 신호를 송출하기만 하면 되므로, 전력 소모가 매우 낮아 배터리 수명이 길고 소형화에 유리합니다.
- 높은 위치 업데이트 속도: 태그가 한 번만 신호를 송출하면 여러 앵커가 동시에 수신하므로, 다수의 태그를 빠르게 추적할 수 있으며 높은 업데이트 속도를 제공합니다.
- 다수의 태그 처리 능력: 수백 개 이상의 태그를 동시에 추적하는 대규모 시스템에 적합합니다.
- 확장성: 태그 수가 증가해도 시스템의 전반적인 성능 저하가 적습니다.
TDoA의 단점
- 정밀한 앵커 동기화 필수: 모든 앵커 간의 완벽한 시간 동기화(나노초 수준)가 필수적입니다. 이는 시스템 구축 및 유지보수의 복잡성을 높이고 비용 상승의 주요 원인이 됩니다.
- 복잡한 시스템 구축: 동기화된 앵커 네트워크 구축 및 관리, 중앙 서버의 연산 처리 등 전체 시스템의 설계와 구현이 TWR보다 복잡합니다.
- 초기 구축 비용: 앵커 동기화 장치, 전용 백본 네트워크 등으로 인해 초기 설치 비용이 상대적으로 높을 수 있습니다.
- 앵커 배치 제약: 동기화 오류에 민감하기 때문에 앵커 배치에 더 많은 제약이 따를 수 있습니다.
TWR과 TDoA 핵심 비교
두 방식의 주요 특징을 비교하여 현장 적용 시 고려해야 할 사항들을 명확히 제시합니다.
| 특성 | TWR (Two-Way Ranging) | TDoA (Time Difference of Arrival) |
|---|---|---|
| 작동 원리 | 태그-앵커 양방향 통신, RTT 측정 | 태그 단방향 신호 송출, 여러 앵커 수신 시간 차이 분석 |
| 태그 전력 소모 | 상대적으로 높음 (양방향 통신) | 매우 낮음 (단방향 송출) |
| 위치 업데이트 속도 | 태그 수 증가 시 저하 가능 | 매우 빠름 (태그 수에 덜 민감) |
| 시스템 확장성 (태그 수) | 소규모~중규모 태그 수에 적합 (수십~수백 개) | 대규모 태그 수에 매우 적합 (수백~수천 개) |
| 앵커 동기화 | 필수적이지 않음 (혹은 느슨한 동기화) | 나노초 수준의 정밀한 동기화 필수 |
| 인프라 복잡성 | 상대적으로 낮음 (간단한 설치) | 상대적으로 높음 (동기화 네트워크, 중앙 서버) |
| 초기 구축 비용 | 낮음~중간 | 높음 |
| 주요 적용 분야 |
|
|
어떤 방식이 당신의 현장에 최적일까요?
TWR과 TDoA 중 어떤 방식을 선택할지는 궁극적으로 현장의 특정 요구사항과 제약 조건에 따라 달라집니다. 다음 질문들을 통해 최적의 결정을 내릴 수 있습니다.
- 추적 대상의 수: 소수의 인원/자산을 추적한다면 TWR이 효율적일 수 있습니다. 수백 개 이상의 태그를 동시에 추적해야 한다면 TDoA가 유리합니다.
- 위치 업데이트 속도: 초고속의 실시간 위치 정보가 필수적이라면 TDoA가 적합합니다. 분 단위 또는 초 단위의 빠른 업데이트가 필요하지 않다면 TWR도 충분할 수 있습니다.
- 태그 배터리 수명: 태그의 배터리 교체 주기를 최소화해야 한다면 저전력 소모의 TDoA 태그가 이상적입니다.
- 구축 예산 및 복잡성: 초기 구축 비용과 시스템 복잡성을 최소화하고 싶다면 TWR이 더 나은 선택일 수 있습니다. 정밀한 동기화 네트워크 구축에 투자할 수 있다면 TDoA가 장기적으로 유리합니다.
- 적용 환경: 앵커 배치에 제약이 적고 유연성이 필요하다면 TWR, 정밀한 앵커 설계와 배치가 가능하고 안정적인 인프라를 구축할 수 있다면 TDoA가 좋습니다.
결론: 현명한 선택으로 안전과 효율을 극대화합니다.
UWB 측위 기술은 산업 현장의 안전과 효율성 향상에 있어 혁신적인 잠재력을 지니고 있습니다. TWR과 TDoA는 각기 다른 장단점과 최적의 적용 시나리오를 가지고 있으며, 그 차이를 명확히 이해하는 것이 성공적인 시스템 도입의 첫걸음입니다.
소규모의 특정 구역에서 고가 자산을 관리하거나 지게차 충돌 방지 등 비교적 적은 수의 태그와 유연한 설치가 필요한 경우에는 TWR 방식이 비용 효율적이고 신뢰할 수 있는 솔루션이 될 수 있습니다. 반면, 대규모 공장이나 건설 현장에서 수많은 작업자의 실시간 위치를 추적하고, 높은 업데이트 속도와 긴 태그 배터리 수명이 요구되는 경우에는 TDoA 방식이 최적의 선택입니다.
이 글을 통해 독자 여러분이 UWB 측위 기술의 본질을 이해하고, 현장의 특성과 비즈니스 목표에 부합하는 최적의 TWR 또는 TDoA 솔루션을 선택하여 궁극적으로 산업 현장의 안전을 강화하고 운영 효율성을 극대화하는 데 핵심적인 가치를 얻으셨기를 바랍니다. 현명한 의사결정을 통해 혁신적인 미래를 만들어 가십시오.